Last summer, I worked at the Flight-Systems and Controls Lab (FSC) at the University of Toronto Institute for Aerospace Studies (UTIAS).
1. The Research
From May to August 2025, I worked with and under MSc student Kevin Chen in learning, assisting and expanding his work on nonlinear control and stability, specifically exploring contraction metrics for quadrotor systems. The core challenge was guaranteeing convergence without relying on local linearization.
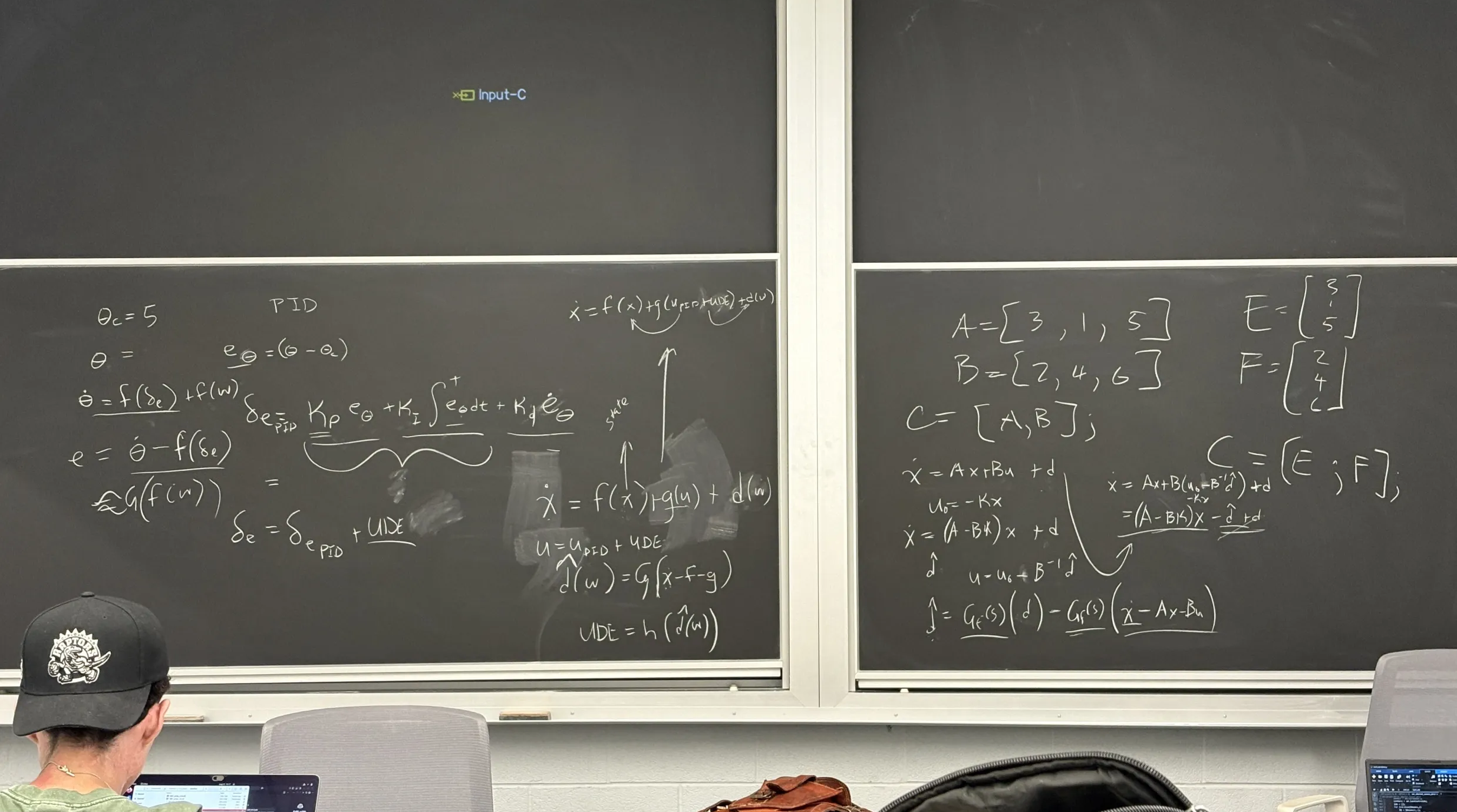
In late August, I was able to join Mr. Kevin Chen and Prof. Liu on site, and provided assistance in Kevin's neural network that generates valid contraction metric matrices for his quadrotor system. I also began attempting to recreate his work with a much simpler non-linear system, but with a different method of network training. That is, I defined my loss function based upon its adherence to a contraction condition derived from the system's Jacobian, rather than the method of using a training set of pre-computed contraction metrics for various states.
Read more (Rough work)
A deep dive into the background mathematics and rough work from this summer.
2. The Culture
Research wasn’t confined to the lab. A surprising amount of thinking happened away from equations entirely. As my work was part of their Aerial Robotics program, I was joined by a few other summer students working on different projects. My work was directly under Kevin as I had furthered background experience and interest due to Rocketry, and my friend Matt was working in MATLAB SimuLink for an uncertainty and disturbance estimation for UAVs. We often had lunch together in the cafeteria, which held home to a plethora of games and activities to unwind with.

We played an obscene amount of ping pong, but chess was the main event. One of my goals this summer happened to be to increase my rating, and Matt just happened to be a 1900-rapid.
After removing time constraints and a few games of what would more accurately be described correspondence chess, I eventually snagged a win after a quick-move blunder! It was a satisfying way to cap off the summer, and I look forward to continuing both my research and hobby chess in the academic year ahead.
3. Future Work
The summer was a launching point. I look forward to continue exploring nonlinear control, perhaps integrating machine learning techniques to adaptively learn contraction metrics in real-time. Currently, I continue to work with Mr. Kevin Chen through hybrid meetings throughout my academic year, and am working on an extension to his research on CCM loops for quadrotor with slung payload systems to 360° roll-maneuvers for racing drones . To end the session, I was invited to Prof. Liu's internal 'LiuTClub' and have since benefitted greatly from his mentorship. I was also asked to return as the sole undergraduate mentor for the next summer cohort at FSC UTIAS, which I look forward to. Overall, my experience here has solidified my passion for intersections of machine intelligence and control theory, and I look forward to where this path takes me next.