SRAD Flight Computer with EKF
Student-Researched-And-Designed (SRAD) avionics system for rocketry team
TL;DR
Developed a fully custom SRAD dual-deploy flight computerusing a real-time EKF for the first high school rocketry team to compete at Launch Canada..
As Avionics Lead for the Bishop Strachan Rocketry Team, I developed a fully custom SRAD flight computer to enable reliable dual-deployment at apogee and main for our second Launch Canada appearance. The design prioritized deterministic eventing, hardware-in-the-loop verification, and fault-tolerant state estimation.
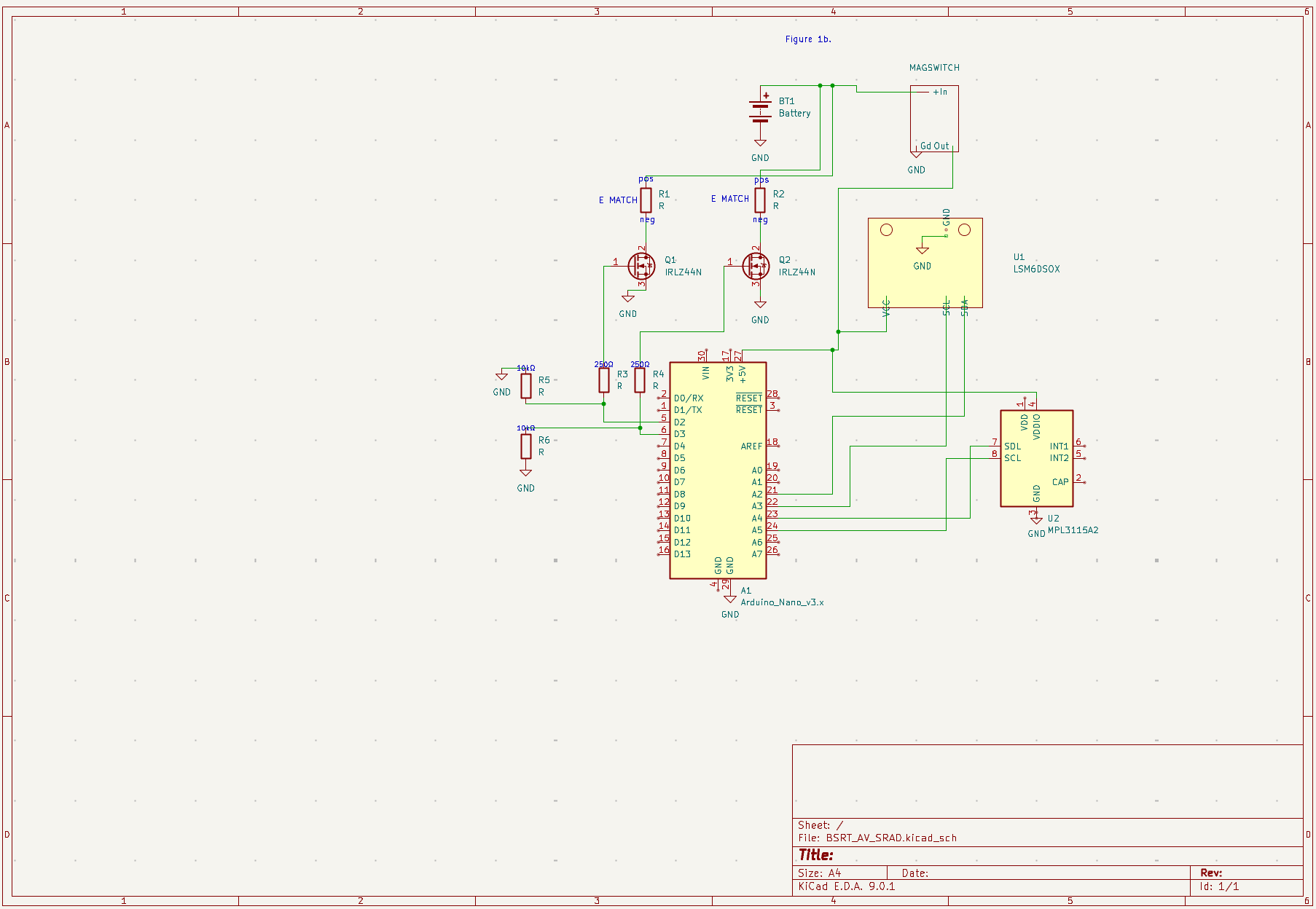
Hardware Architecture
The flight computer is built around a Teensy 4.1 MCU(600 MHz), chosen for its computational headroom and embedded compatibility. Key peripherals include:
- ICM-20948 9-DoF IMU – orientation and angular rate sensing
- BMP388 barometer – altitude and pressure readings
- Dual MOSFET ignition channels for apogee and main deployment
- Magnetic arming switch and dual LiPo power rails
Software & EKF Implementation
I implemented an Extended Kalman Filter (EKF) to fuse accelerometer and barometric data in real time, producing smooth, drift-resistant estimates of altitude and velocity. The system supports a deterministic event scheduler for apogee and main separation, verified through Hardware-in-the-Loop (HIL) tests.
This SRAD avionics project laid the groundwork for future flight computers targeting full SRAD-based avionics at Launch Canada 2026.
Write-up still in progress.. come back later for more details!